
Stanford-CS140 Operating System Project 随记
信息
本文为我在完成 ShanghaiTech CS130 project (Stanford CS140 project) 时的学习与思考。
关于 project
简单来说,本 project 提供了一个基本的 PintOS 系统,你需要根据题目对本系统进行修改、优化等,并通过每个子 project 的测试点。
我将其提供的 PintOS 系统进行了 docker 打包,运行在一个 Ubuntu 系统中,以使协作更顺利:链接
project 1: Threads
在这个项目中,提供了一个功能及其基础的线程系统,我们需要扩展它的功能。
Alarm Clock
- 问题:系统现有的
timer_sleep()函数(在devices/timer.c)下使用的是 busy waiting,即不断循环直至 sleep 结束。
那么我们为了解决这个问题,可以考虑在线程进入睡眠时添加到一个 waiting_list 队列中(这个队列按照 wakeup 顺序排序),并将此线程 thread_block() 掉,由 interrupt 在每个时钟周期检测列表头是否应该苏醒,并逐个 thread_unblock() 直至列表头不再需要唤醒。
思路很简单,剩下的就是代码细节的问题:
- 我们需要注意普通线程和 interrupt 线程的并发冲突问题,由于
waiting_list需要在timer_sleep()函数(由普通线程调用)和timer_interrupt()函数(由 interrupt 线程调用)中同时被使用,我们需要在timer_sleep()操作该队列之前禁用 interrupt。 - 你会发现完成后始终有一个
alarm-priority测试点 fail 掉,阅读测试点 c 代码可发现其需要优先级调度(本 project part2,我至今不理解为什么要把这个 part 排在 Priority Scheduling 前面),其对本 part 代码的影响就是在 interrupt 线程中只要唤醒了线程,就需要进行intr_yield_on_return()(即将正在进行的线程扔回ready_list,并按照优先级重新取出)
另外,你会发现在不对提供的 PintOS 做任何修改的情况下,仍可以通过 part1 的所有测试点...
Priority Scheduling
- Standard:实现严格的优先级调度机制。
- 当一个具有更高优先级的线程加入到
ready_list中时,正在运行的低优先级线程需要thread_yield()让出 CPU 资源。 - 当多个线程在等待锁(lock)、信号量(semaphore)或条件变量(condition variable)时,一旦资源释放,优先级最高的等待线程应当被优先唤醒。
- 当一个具有更高优先级的线程加入到
这个 part 比上一个复杂了一些,主要在于提出了很多模糊的术语,我们需要理解 lock, semaphore 和 condition variable 都是什么。
总体来说,我们可以将这三个名词从底层到高层排序,分别是 semaphore -> lock -> condition variable。
下面我们简单介绍一下这三个东西。
semaphore
核心是计数器+阻塞队列。
struct semaphore {
unsigned value;
struct list waiters;
}它可以管理有限数量的资源。
我们可以使用 sema_down(s) 和 sema_up(s) 函数对资源进行获取、释放,若获取时无对应资源则阻塞直到提供资源给该线程。
lock
本质上是一种 semaphore(1)。
例如我们分配一片共享内存,多个线程可以操作这片内存,就必须对此内存进行 lock 以避免 race condition。
condition variable
多个线程等待某个条件成立后被唤醒。
好了,现在对这三个名词有了基本理解后思考一种情况:如果某个 lock 被一个低优先级线程拥有,又有一个高优先级线程进入了 ready_list,且希望拥有这个 lock,受 semaphore 的限制,它需要等待低优先级线程运行完释放 lock 才能被唤醒,若此时有一堆不需要该锁的中优先级线程加入,则一直不会运行原本就应该先运行的高优先级线程,这是我们不想看到的。
于是引出了该 part 的第二个任务:
- Priority Donation
- 线程拥有锁后,其优先级应为持有锁的优先级(定义锁的优先级为该锁等待队列线程和持有线程的优先级最大值)。
- 另外,我们不难发现会出现会出现递归现象,那么整条需求链路上的线程优先级都应该被调整。
- 当锁被释放后,原本持有该锁的线程优先级应被更新,其可能会被
thread_yield()。
代码实现起来并不算难,难点在于理解上述概念(不知道我的表述是否足够清晰了)。
Advanced Scheduler
- 实现一个类似于 4.4 BSD 操作系统的多级反馈队列调度器 (Multilevel Feedback Queue Scheduler, MLFQS),以降低系统的平均响应时间。
什么是 BSD?
BSD 调度器的目标是在没有外部优先级信息的情况下,自动实现公平调度和良好的交互性响应。
关键在于:
动态优先级
不像简单的优先级调度器需要手动设置优先级,BSD 调度器会根据线程的行为自动调整优先级:
- CPU 密集型任务(计算多)→ 优先级降低
- I/O 密集型任务(交互多)→ 优先级提高
指标
- recent_cpu(最近 CPU 使用量)
- nice 值:用户可设置(-20~20),nice 值越高 = 越"友好" = 优先级越低
- load_avg (系统负载,影响 recent_cpu 衰减速度)
具体实现 doc
Project 2: User Program
Project 2 需要能够让程序通过 System Call 与操作系统交互,让操作系统能够处理程序的错误。
完成 Project 2 的时候需要注意可能带来影响的 bug,因为未来 Project 3 和 Project 4 都将基于 Project 2 的代码实现。
Process Termination Messages
文档要求所有用户进程退出时都打印形如 name: exit(status) 的信息。这里的退出并不只包括显式调用 exit(status),也包括用户程序触发非法访问、非法指令等异常后被内核杀死。
因此我们在线程结构中维护 exit_status:
- 正常调用
SYS_EXIT时,由sys_exit()写入用户传入的 status; - 用户指针非法、page fault 等异常退出时,统一通过
exit_process_with_error()将状态设为-1; process_exit()中如果当前线程确实运行过用户进程,就打印退出信息。
halt 是一个例外。它会直接关闭 PintOS,不应该额外打印某个进程的退出信息。
Argument Passing
用户程序最终会从 _start(int argc, char *argv[]) 开始执行,如果用户栈上没有正确放置 argc 和 argv,程序一启动就会因为访问错误栈内容而 page fault。
这里需要注意:传入 process_execute() 的 file_name 并不只是可执行文件名,而是完整命令行,例如 echo x y。因此我们需要先把命令行拆成两部分:
- 第一个 token 作为真正要加载的程序名,用于
thread_create()和load(); - 全部 token 作为参数列表,用来构造用户栈。
我们在 process_execute() 中先复制一份命令行,然后用 strtok_r() 取出第一个 token 作为线程名。真正构造栈的工作放在 start_process() 中完成:它会再次将完整命令行拆成 argv,调用 load(argv[0], ...) 加载可执行文件,加载成功后再开始向用户栈写入参数。
栈的构造顺序需要符合 x86 的函数调用约定。由于栈向低地址增长,所以实现时大致是反着压入:
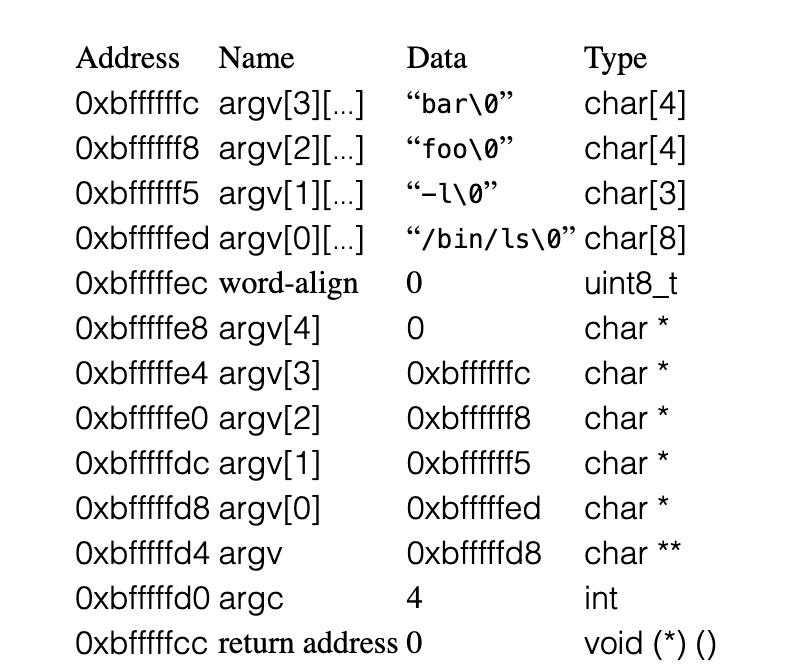
最终用户程序看到的栈就像普通 C 函数调用一样,main(argc, argv) 可以直接读取参数。这里一个很容易犯错的地方是:不能把完整命令行传给 load(),否则系统会尝试打开名为 echo x y 的文件,而不是打开 echo。
System Calls
PintOS 中,用户程序发起 system call 时,会把系统调用号和参数放在用户栈上。进入内核后,syscall_handler() 可以通过 f->esp 找到这些参数。
因此,一个 system call 的处理流程大致是:
- 从用户栈中读取 syscall number;
- 根据 syscall number 判断是哪一个系统调用;
- 从用户栈继续读取对应参数;
- 验证所有用户传入的指针是否合法;
- 调用内核中的实际处理函数;
用户指针验证
这部分文档中提及了两个方法,我们采用的是第二种方法:依赖页错误(page fault)机制进行检查。文档中提供的get_user和put_user函数,会尝试从用户地址读取或写入一个字节。如果访问失败,就返回错误,并让当前用户进程以 -1 退出。
我们基于get_user封装了两个函数
user_read (void *kaddr, const void *uaddr, size_t size)从
uaddr读入size长度的内容到kaddr,成功读入则返回true,反之返回false。user_string (char *kaddr, const void *uaddr, size_t max_size)从
uaddr读入最多max_size长度的字符串到kaddr,成功读入则返回true,反之返回false。
借助这两个函数,大多数 syscall 在访问用户内存时,只需调用对应的辅助函数即可完成用户指针验证,而无需手动检查页表映射或地址合法性。
不过 SYS_READ 是一个特殊情况。由于该 syscall 需要向用户提供的 buffer 中写入数据,因此不仅要保证地址可读,还必须保证其可写。对此,我们使用 put_user 对 buffer 覆盖范围内的地址逐字节尝试写入 0。若写入过程中未发生异常,则说明该缓冲区可写,从而完成验证。
File Syscalls
这里比较重要的是文件描述符,也就是 fd。用户程序拿到的 fd 只是一个整数,而真正的文件对象是内核中的 struct file *。因此我们需要在每个进程中维护一个 fd table,用来把用户态的 fd 映射到内核态的文件对象。
另外,所有涉及文件系统的操作都需要注意同步问题。PintOS 提供的文件系统本身并不是完全线程安全的,如果多个进程同时读写文件,可能会出现 race condition。因此我们使用一个全局的 filesys_lock 来保护文件系统操作。
我们的实现中,struct thread 中维护了一个固定大小的 fd_table[128]:
fd = 0表示标准输入,read(0, ...)通过input_getc()从键盘读入;fd = 1表示标准输出,write(1, ...)通过putbuf()写到控制台;fd >= 2才对应真正打开的文件,open()会从2开始寻找空位。
这样做的好处是查找 fd 非常直接,用户传入的 fd 可以直接作为数组下标访问。不过它也带来了一个固定上限:每个进程最多维护 128 个 fd。对于本 project 来说这个限制足够使用。
文件相关 syscall 中还需要处理字符串指针。比如 create、remove、open 都会接收用户传入的文件名指针。我们不会直接把这个用户指针传入文件系统,而是先申请一页 kernel page,用 user_string() 把文件名复制到内核空间,再调用 filesys_create() / filesys_open() 等函数。这样即使用户传入了非法字符串,也只会终止当前用户进程,不会让文件系统拿到不可信地址。
进程退出时,还需要扫描自己的 fd table,将所有未关闭的文件逐个 file_close()。否则即使用户程序忘记调用 close(),内核也应该回收对应资源。
process_wait / process_execute
这两个函数在 process.c 中,syscall 会通过它们实现 exec 和 wait。
其中 exec 对应 process_execute(),作用是创建并启动一个新的用户进程;wait 对应 process_wait(),作用是让父进程等待某个子进程结束,并获得它的退出状态。
这部分的核心问题是:父进程和子进程之间需要共享一部分状态。
因为父进程调用 exec() 之后,只会得到一个子进程的 tid。但是仅有 tid 是不够的,后续还需要:
- 知道子进程是否成功加载
- 知道子进程是否已经退出
- 知道子进程的退出状态码
- 等待子进程退出 / 加载
所以我们需要额外维护一个 child_info 结构体,用来记录子进程的信息。我们创建了如下结构体
struct child_info {
tid_t tid; /* 子进程tid */
int exit_status; /* 子进程退出状态码 */
bool exited; /* 子进程是否已经退出 */
bool loaded; /* 子进程是否已经加载 */
struct list_elem elem;
struct semaphore wait_sema;
struct semaphore load_sema;
int count; /* 父/子进程有几个还在,初始值为2,count=0才会free */
struct lock lock;
};然后我们就可以基于这些信息实现 exec 和 wait 的功能。
process_executeprocess_execute()对应 syscall 中的exec。它的返回值不只表示子进程线程是否创建成功,还需要表示子进程是否成功加载了可执行文件。因此,父进程调用
thread_create()创建子进程后不能立即返回,而是需要通过load_sema等待子进程完成加载。子进程在load()结束后,会把加载结果记录到对应的child_info中,并通过sema_up(&child->load_sema)唤醒父进程。父进程从
sema_down(&child->load_sema)返回后,再检查child_info->loaded。如果子进程加载成功,则返回子进程的tid;如果加载失败,则返回-1。process_waitprocess_wait()对应 syscall 中的wait。它需要让父进程等待指定子进程退出,并获得该子进程的退出状态。父进程会先在自己的子进程列表中查找对应的
child_info。如果找不到,说明传入的tid不是当前进程的子进程,直接返回-1。如果找到了对应子进程,并且子进程尚未退出,父进程就通过wait_sema阻塞等待。子进程退出时,会把自己的退出状态写入
child_info->exit_status,并将child_info->exited设为true,然后通过sema_up(&child->wait_sema)唤醒可能正在等待它的父进程。父进程被唤醒后,就可以读取子进程的exit_status,并将其作为wait的返回值。
不过这里还需要考虑资源释放的问题。父进程和子进程的退出顺序是不确定的:可能父进程先退出,也可能子进程先退出。因此,child_info 不能简单地只由父进程或子进程单方面释放。
为了解决这个问题,我们使用 count 作为引用计数。父进程和子进程各自持有一份对 child_info 的引用。当其中一方不再需要这个结构体时,就调用 child_release() 将 count 减一。只有当父进程和子进程都不再需要它,也就是 count 变为 0 时,才真正释放这个 child_info 结构体。
Denying Writes to Executables
Project 2 还有一个容易忽略的要求:正在运行的可执行文件不能被写入。否则一个进程运行到一半,另一个进程把它的 executable 改掉,后续 Project 3 做 lazy loading 时会出现非常难判断的行为。
PintOS 已经提供了 file_deny_write() 和 file_allow_write()。关键在于:不能在 load() 结束后立刻关闭 executable 文件。因为一旦关闭,deny write 的效果也会随之消失。
因此我们的做法是在 load() 成功后:
- 将打开的 executable 文件保存在当前线程的
runing_file中; - 调用
file_deny_write()禁止其他写入; - 直到该进程退出时,再在
process_exit()中关闭这个文件。
这样 executable 在整个进程生命周期内都会保持打开和写保护状态。
警告
如果你看到这里,说不定你已经写完了你的代码,建议你执行make clean && make check 5-10 次,防止可能出现的随机性 FAIL。
Project 3: Virtual Memory
警告
Project 3 在 Project 2 的代码基础上实现,开工前尽量保证 Project 2 的正确性,否则在 Project 3 中改 Project 2 的 bug 会非常非常痛苦。
Project 3 需要在 Project 2 的基础上实现一系列和内存管理相关的功能。目前用户程序运行前都要加载所有需要的页面,也没有淘汰机制,能够同时运行的程序数量和程序大小都受到物理内存大小的限制。
Project 3 并没有初始的代码,所有新增的代码文件需要前往根目录下Makefile.build中注册。
Frame Table
警告
Project 3 需要处理很多地址,每次不验证addr != NULL都是对未来 debug 的自己不负责。
每次处理 Frame Table 时不加锁都是对未来 debug 的自己不负责。
每次发现NULL之后不 release 锁的更是对未来 debug 的自己不负责。
参考文档 4.2 一节,我们首先需要实现 Frame Table。
Frame Table 用来记录系统中已经分配出去的物理页。后续的swap、mmap 等功能都需要依赖它来查找和管理 frame,因此它是 Project 3 中虚拟内存系统的基础结构。
我们的实现中,Frame Table 使用 PintOS 提供的 list.h 维护。这一阶段的实现可以参考 palloc.c 的思路,对 frame 的获取和释放进行简单封装。需要注意的是,如果一次操作中需要获取多个 frame,而中途分配失败,就必须释放之前已经成功分配的 frame,避免产生内存泄漏。
此外,由于 Frame Table 是全局数据结构,可能被多个线程同时访问,因此对它的修改和遍历都需要使用 lock 保护,防止出现神奇又神秘的同步问题。
Hash Table
此处我们先介绍一下哈希表。
PintOS 在 lib/kernel/hash.h 和 lib/kernel/hash.c 中实现了一套通用的哈希表结构。它的作用和普通哈希表类似:通过一个 key 快速查找对应的元素,避免每次都在线性表中遍历查找。它只要求被存储的结构体中包含一个 struct hash_elem 字段。之后我们就可以通过这个 hash_elem,把自己的结构体挂到哈希表里。这和list.h是类似的。
使用哈希表时,需要提供两个函数:
hash:告诉哈希表如何根据某个字段计算哈希值;less:当两个元素需要比较时,告诉哈希表如何判断大小或是否相同。
在实现 Supplemental Page Table 中,我们需要知道一些相关函数
hash_insert()用来把一个新的元素插入哈希表中。对于 Supplemental Page Table 来说,当我们新建一个 SPT entry 后,就可以通过hash_insert()将它加入当前进程的 SPT 中。如果表中已经存在相同upage的元素,hash_insert()会返回原有元素,因此也可以用它来判断是否出现了重复页面。hash_find()用来在哈希表中查找元素。它并不是直接传入 key,而是传入一个临时构造的结构体元素。比如我们想通过upage查找对应的 SPT entry,就可以先创建一个只填好upage的临时 entry,再用hash_find()查找哈希表中是否存在相同页面。
Supplemental Page Table
Supplemental Page Table 用来记录用户虚拟页面的额外信息,使内核能在 page_fault 时判断该页面是非法访问,还是需要从文件、swap 或栈增长中按需加载。
我们第二个需要实现的就是 Supplemental Page Table。这部分我们使用哈希表实现,参考hash.h/hash.c,并使用upage来索引。
在初始步骤中,Supplemental Page Table 结构体只需要记录upage和hash_elem即可。后续步骤中,按照需要给结构体新增项即可。
Supplemental Page Table 会贯穿整个 Project 3,无论是 Memory Mapped Files,还是 Swap,亦或是 Stack Growth、Eviction 的部分,都需要或多或少在 Supplemental Page Table 中添加点东西。
Lazy Loading / Memory Mapped Files
警告
Project 3 同样需要处理很多文件,每次不给文件操作加锁,都是对未来 debug 的自己不负责。
每次给文件操作 acquire 或 release 同一个锁两遍以上的,更是对未来 debug 的自己不负责。
我们首先需要解释一下 Project 3 中和文件相关的页面加载到底要做什么。
在 Project 2 中,process.c 里的 load_segment() 会在程序启动时直接把可执行文件中的 segment 加载到内存里。这样显然很简单,但是非常浪费空间
Project 3 要解决的一个重要问题就是 lazy loading。具体来说,load_segment() 不再立刻把文件内容读入 frame,而是先为这些用户虚拟页创建 Supplemental Page Table 来记录这个页面应该如何被加载。
这样,程序启动时并不会马上占用大量物理内存。只有当用户程序真正访问某个尚未加载的页面时,才会触发 page_fault。此时 page fault handler 会检查 Supplemental Page Table,如果发现这个地址对应的页面是合法的、只是还没有被加载,就分配一个 frame,然后根据 SPT (Supplemental Page Table) 中记录的信息从文件中读取内容,并将这个 frame 安装到当前进程的 page table 中。
我们还需要实现mmap和munmap两个 System Call。每一次mmap都要对应一个单独的id,我们可以使用结构体mmap_entry来保存相关信息。同时,mmap的文件和thread绑定,我们可以把相关信息储存在thread中。
当用户程序调用 mmap 时,和 lazy loading 一样,操作系统不会立刻把整个文件读入内存,而是把这个文件映射到从 addr 开始的一段用户虚拟地址空间上。文件可能占据一个或多个 page,因此我们需要为这些 page 分别创建 Supplemental Page Table。
每个被映射的页面都会记录它对应的文件、文件偏移量、需要读取的字节数以及需要补零的字节数。之后当用户程序访问这些地址时,如果对应页面还没有加载,就会触发 page_fault,再由内核把对应的文件内容加载进 frame。
然后是munmap,若文件被修改,则需要写回文件系统,这里我们需要使用pagedir_is_dirty (thread_current ()->pagedir, upage)来判断文件是否被修改过。
提示
此处可以进行一次 check,确保 Memory Mapped Files 相关测试点通过。
Stack Growth
Project 2 中 PintOS 只给 Stack 分配了一页的 page,这显然不够用。我们要移除这个限制。
首先我们看文档,
Allocate additional pages only if they "appear" to be stack accesses.
这里我们看到了一个非常神秘的词appear,Project 3 需要你给 Stack 额外的页面仅当“看起来像”栈指针,我们自然对这个出现在这很神秘的词语有疑问。不过既然文档说只要看起来像,那我们可以针对page_fault的地址作出判断,依据文档,我们可以给出如下判断条件
bool if_stack_pointer = fault_addr >= stack_pointer - 32
&& fault_addr <= PHYS_BASE
&& fault_addr >= PHYS_BASE - 8 * 1024 * 1024;由于page_fault可能由 kernel 直接触发,也可能在 user 切换到 kernel 的时候触发,而在前者我们没有办法获取f->esp,所以我们需要在当前thread中记录其栈指针。记录的时机可以在前一次 Syscall 的时候,于是
void *stack_pointer = user ? f->esp : thread_current ()->esp;当发生page_fault且我们发现这是一个stack_pointer的时候,我们就可以分配一页 stack page。
提示
此处可以进行一次 check,确保 Stack Growth 相关测试点通过。
BitMap
此处我们再简单介绍一下 Bitmap。
PintOS 在 lib/kernel/bitmap.h 和 lib/kernel/bitmap.c 中实现了一套位图结构。Bitmap 可以理解为一组连续的 bit,每一个 bit 只有两种状态:true 或 false。因此它非常适合用来记录某些资源是否已经被占用。
在 Swap Table 中,我们可以把每一个 swap slot 看作一个编号:
- 第
0位表示第0个 swap slot 是否被占用; - 第
1位表示第1个 swap slot 是否被占用; - 以此类推。
如果某一位是 false,说明对应的 slot 还没有被使用;如果是 true,说明这个 slot 已经被分配出去了。
在实现 Swap Table 时,我们需要知道一些相关函数:
bitmap_create()用来创建一个指定大小的 bitmap。比如 swap 分区中一共有多少个 page-sized slot,就可以创建多少位的 bitmap。bitmap_scan_and_flip()用来查找一段连续的空闲 bit,并将其状态翻转。对于 swap 来说,我们通常只需要找一个空闲 slot,所以可以用它找到一个空闲位置,并立刻把这个位置标记为已经使用。bitmap_reset()用来把某一位重新设置为false。当一个页面从 swap 中读回内存后,对应的 swap slot 就可以被释放,此时需要用bitmap_reset()把这个 slot 标记为空闲。bitmap_test()用来检查某一位当前的状态。它可以判断某个 slot 是否正在被使用。
Swap
警告
在调用 Swap 的时候不检查是否成功的都是对未来 debug 的自己不负责。
在 Project 3 中,用户程序看到的是虚拟地址空间,但真正能放在内存里的页面数量受物理内存大小限制。当 frame 不够用时,操作系统就需要选择一个暂时不用的页面,将它从物理内存中换出。如果这个页面之后还可能被访问,就不能直接丢弃,而是需要把它保存到 swap 分区中。
因此,我们需要实现 Swap Table 来管理 swap 分区中哪些位置已经被使用,哪些位置仍然空闲。通常可以使用 bitmap 来记录 swap slot 的使用情况。
这里需要注意,Swap 的一个 slot 并非一个 page,一个 page 对应 8 个 slot。还需要注意的是 Swap 的初始化时机。我们需要在init.c里面初始化 Swap,我们通过block_get_role (BLOCK_SWAP)获得BLOCK_SWAP,但是太早初始化无法获得BLOCK_SWAP,太晚初始化会让系统跑起来了之后还没初始化 Swap,都会出事。
Eviction & Reclamation
这里我们需要实现一套页面淘汰和页面恢复的机制。
在 Project 3 中,用户程序使用的是虚拟地址空间,但真正的物理内存大小是有限的。当没有空闲 frame 可以分配时,操作系统就不能简单地失败,而是需要从当前已经使用的 frame 中选择一个暂时不用的页面,将它从物理内存中淘汰出去,这个过程就是 eviction。
但是,被淘汰的页面不能随便直接丢弃。不同来源的页面需要用不同的方式处理,否则之后用户程序再次访问这个页面时,就无法恢复出正确内容。
因此,我们首先需要在 Supplemental Page Table 中记录页面的类型,例如:
enum spt_type {
PAGE_MMAP,
PAGE_EXEC,
PAGE_STACK,
PAGE_OTHER
};这样在淘汰页面时,就可以根据页面类型决定它应该被如何保存。
对于通过 mmap 映射的文件页面,如果页面被修改过,也就是 dirty bit 被设置过,那么在淘汰时需要把页面内容写回原文件;如果页面没有被修改,则可以直接丢弃,因为之后还可以从原文件重新读入。
对于 exec 相关的页面,也就是从可执行文件中 lazy loading 得到的页面,如果页面没有被修改,同样可以直接丢弃,之后 page fault 时重新从可执行文件加载即可。但是如果这个页面被修改过,就不能再简单地从原文件恢复了,因为原文件中的内容已经不是当前页面的最新内容。这种情况下就需要把页面写入 swap。
对于 stack page,它没有对应的文件作为后备存储,因此一般不能直接丢弃。即使页面当前没有被标记为 dirty,为了保证程序之后仍然能看到正确的栈内容,比较稳妥的做法也是将其写入 swap。
所以整体来说,淘汰页面时可以按照下面的思路处理:
PAGE_MMAP:dirty 时写回文件,不 dirty 时可以直接丢弃;PAGE_EXEC:不 dirty 时可以从原文件恢复,dirty 时需要 swap;PAGE_STACK:通常需要 swap;PAGE_OTHER:如果没有可靠的文件后备,也应该 swap。
完成页面内容的保存后,还需要清除原来的 page table 映射,并更新 SPT entry 的状态。比如被换出到 swap 的页面,需要在 SPT 中记录对应的 swap slot;被直接丢弃的文件页面,则需要保留 file、offset、read bytes、zero bytes 等信息,方便之后重新加载。
接下来是如何选择要淘汰的 frame。
不是所有 frame 都适合被淘汰。例如,正在进行 I/O 的 frame 不能被淘汰,否则可能出现读写到一半页面被换走的问题。因此可以在 Frame Table 的表项中加入一个 busy 字段,只有当 busy == false 时,这个 frame 才能作为 eviction 的候选对象。比如在 syscall 读写用户 buffer、mmap 写回文件、swap in / swap out 等过程中,都可以临时将相关 frame 标记为 busy,避免它在关键操作中被淘汰。
在选择具体 victim frame 时,可以实现一个简化版的 clock algorithm,也就是 second-chance algorithm。
我们维护一个类似时钟指针的变量,在 Frame Table 中循环移动。每次检查当前 frame 时:
- 如果该 frame 是 busy,则跳过;
- 如果该 frame 的 accessed bit 为 true,说明它最近被访问过,就把 accessed bit 清成 false,然后跳过;
- 如果该 frame 的 accessed bit 为 false,说明它最近没有被访问,就选择它作为 victim frame。
这里用到的 accessed bit 可以通过 pagedir_is_accessed() 检查,并通过 pagedir_set_accessed() 清除。这个算法的直觉是:最近访问过的页面先给一次机会,只有连续一段时间没被访问的页面才会被淘汰。
页面被淘汰后,之后用户程序如果再次访问这个虚拟地址,就会触发 page_fault。这时 page fault handler 会去 Supplemental Page Table 中查找对应 entry,并根据 entry 中记录的信息恢复页面:
- 如果页面是 file-backed 且没有被 swap,就重新从文件加载;
- 如果页面在 swap 中,就分配新的 frame,并从对应 swap slot 读回;
- 如果页面是合法的 stack growth,就创建新的 stack page;
- 如果 SPT 中找不到对应页面,才说明这是非法访问,需要结束进程。
这些就是 Project 3 的大概的思路。到这,你可以尝试跑20次make clean && make check,确保一切正常。
Project4: File System
Buffer cache
目前,PintOS 访问文件系统时,总会直接从磁盘读写。
众所周知地,从磁盘访存是极慢的,我们迫切地需要一种缓存的机制提升读写效率,减少对磁盘的访问。
此部分,我们需要修改文件系统,使其保留文件块的缓存。当发起读取或写入某个块的请求时,先检查该块是否在缓存中;如果在,就直接使用缓存中的数据,而不访问磁盘。否则,就从磁盘把该块取入缓存,必要时驱逐一个较旧的缓存项。在此项目中,缓存大小不得超过 64 个扇区。
由于缓存大小有限,我们需要一个淘汰算法来决定当缓存满时将哪个缓存写入磁盘空出,其复杂度应类似于 时钟算法。
可以想到,我们需要评估一个缓存是否还 “活着”,也就是说,它最近是否有被读写过?于是,类似于 Project3 的 Eviction 过程我们就是可以实现这个算法。
同时我们需要一个 write_behind 机制——内容保留在缓存中,必要时再写入磁盘。这是很好实现的,但重点是我们需要考虑到缓存机制实际降低了安全性,若文件系统崩溃,缓存的加入只会加重损失。
于是我们需要一个线程,周期性地将缓存中的内容写入磁盘,同时,不要忘记再文件系统关闭时也要将所有内容写入。可以想象,若周期过短,缓存效果将下降,若周期过长,安全性会下降,这是这个工程上必然遇到的困境。
为了加速读取,我们还可以设计一个 read_ahead 机制——当某个线程请求读取磁盘中某个块时,它有很大概率会继续读取下一个块,我们 异步 地将下一个块的内容提前写入缓存便可以加速读取。
提示
设计完这些,并通过 Project2 的测试点,本部分就收工啦!

